路灯杆底板焊接机
机器人灯杆底板焊接机,型号 : RBW2-120/260
三焊接工位
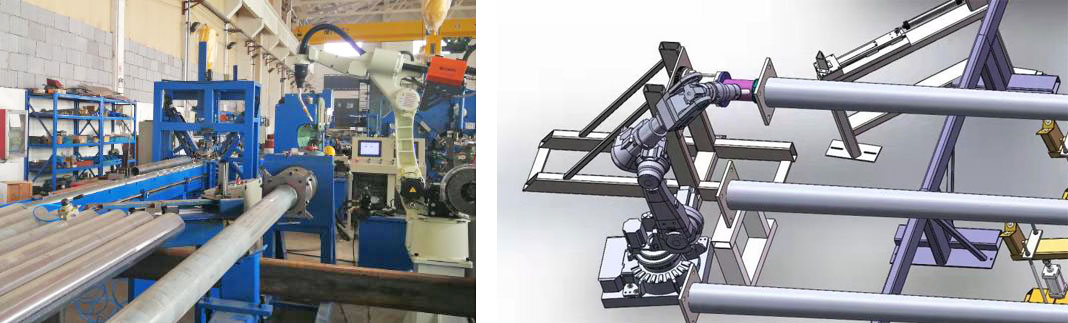
用途:本焊接系统用于路灯杆底板焊接生产。通过机器人与焊接电源的实时通讯,根据不同的焊接位置采用不同的工艺参数,取得优质的焊缝。总体布局如下图:

特点:
(1)带有涨管功能,消除底板内孔和杆子之间的间隙,顺利实现自动焊接。
(2)具有底板加强筋自动放置和焊接功能。
(3)采用日本川崎重工机器人,操作性好,质量过硬。
(4)采用肯倍焊接电源,焊缝质量好,焊接效率高。
(5)变位机翻转角度大,可实现任意角度焊接。
(6)节省大量人工成本。
(7)可适应全天候长时间工作。
(8)焊接成型美观,可靠性高。
(9)整个机器单向流水线的形式设计,杆子堆放在机器的左边,一根接一根向右边移动,完成焊接,焊接完成的杆子堆放到右边。杆子移动升起,无需行车,操作人员劳动强度低。
(10)设立3个焊接工位,焊接生产速度更加快。
一个工位上下料,装配底板,完成外焊接贺4个加强三角筋的焊接。
第二个工位完成内圈的焊接
| No. | Item | Parameter |
| 1 |
小直径 Pole or Round bar min diameter |
120mm |
| 2 |
路灯杆直径 Pole or Round bar max diameter |
260mm |
| 3 |
长度 Pole or Round bar max.length |
12~14m |
| 4 |
小厚度 Pole or Round bar min. thickness |
2.5mm |
| 5 |
厚度 Pole or Round bar max. thickness |
4mm |
| 6 |
重量 Pole or Round bar max weight |
150kg |
| 7 |
驱动速度 Driving speed |
6~48m/h, adjustable, with AC Servo control 伺服可调 |
| 8 |
焊接速度 Welding speed( depend on Voltage , current setting, and welding height, and dimension of pole) |
参考速度5~7分钟/根 (reference speed 5~7 minutes/piece) |
机器人系统介绍
1、川崎机器人
BA系列是专为焊接开发的机器人系列,专用于焊接,操作简单,可以通过简单的示教操作即可达到熟练的焊接作业操作。在示教器上设有可视效果及便于操作的可触摸液晶彩色显示屏。机器人与焊机仅需要一根电缆连接,可将焊接条件分类存储,一键调用。

|
示教方式 Teaching methods |
简单操作示教AS语言编程 Simple Operation Teaching AS Language Programming |
|
|
动作方式 Manner of execution |
手动模式 Manual mode |
各轴独立、基本坐标系、工具坐标系 Independent axes, basic coordinate system and tool coordinate system |
| 再现模式Reproduction mode |
各轴/直线、圆弧插补动作 Interpolation action of each axis/line and arc |
|
|
存储容量 Storage capacity |
8MB(8000步相当) 8000 steps are equivalent |
|
| 通用信号General signal |
外部操作信号 External Operating Signal |
紧急停止,外部保持信号 Emergency stop, external hold signal |
|
输入输出 Input and output |
32+32 | |
川崎BA系列机器人采用 E01控制柜,外形紧凑,操作体系适宜,功能丰富,易维护和具有高扩展性。6.5英寸彩色液晶屏幕,触摸屏640×480像素。采用背照光,使液晶画面更容易看清。操作系统采用WINDOWS CE。窗口显示采用下拉式菜单,使编辑操作过程简单易行。

|
功能 Fuctions |
标准弧焊Standard arc welding | |
|
型号 Model |
BA006N | |
|
手臂形式 Arm form |
垂直多关节Vertical multiple joints | |
| 动作自由度DOF | 6轴axis | |
|
负载能力 Maximum load capacity(KG) |
6 | |
|
动作范围 Maximum range of action [DEG] |
JT1 电源线及控制线 |
±165 |
| JT2 | +150~-90 | |
| JT3 | +45~-175 | |
| JT4 | ±180 | |
| JT5 | ±135 | |
| JT6 | ±360 | |
|
动作速度 Maximum speed of action [DEG/S] |
JT1 电源线及控制线 |
240 |
| JT2 | 240 | |
| JT3 | 220 | |
| JT4 | 430 | |
| JT5 | 430 | |
| JT6 | 650 | |
|
惯量 Inertia[N.M] |
JT4 | 12 |
| JT5 | 12 | |
| JT6 | 3.75 | |
|
惯性力矩 Inertial moment [KG.M2] |
JT4 | 0.4 |
| JT5 | 0.4 | |
| JT6 | 0.07 | |
|
重复定位精度 Repeated positioning accuracy [MM] |
±0.05 | |
|
水平伸长度 Horizontal elongation[MM] |
1445 | |
|
本体重量 Weight[KG] |
150 | |
|
电源容量 Power capacity[KVA] |
3.0 | |
|
安装方式 Installation mode |
地面、顶装Ground、Top loading | |
|
安装环境 Installation environment |
温度 Temperature |
0~45° |
|
湿度 Humidity |
35~85%(不能结露No dew) | |
|
振动 Vibration |
0.5G以下Less than 0.5 | |
|
其他 Others |
机器人安装必须远离:易燃或腐蚀性液体或气体 电器的干扰 Robot installation must be away from the interference of flammable or corrosive liquid or gas appliances |
|
|
IP等级 Level |
IP65 | |
|
推荐控制器 Recommended Controller |
E01 | |
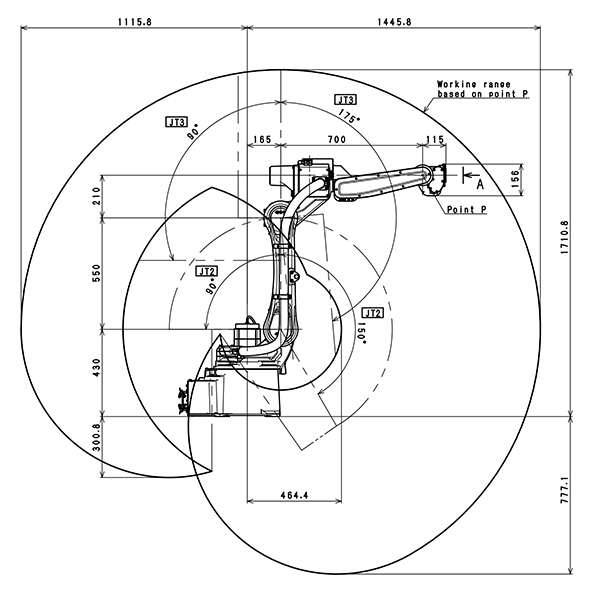
动作范围:
2、焊机和防撞器介绍, iCATmini 防撞器。

焊接电源:芬兰肯倍原装
| Model 型号 | KW300A |
|
Cooling type 冷却方式 |
Air cooling |
| Arcing time factor暂载率 | 100% |
| Rated value额定值 | 300A CO2 |
| 300A mixed gas混合气体 | |
| Wire feeding diameter 送丝直径 | 1.0-1.2mm |
| Model 型号 | Robot mount iCAT mini |
| Size 尺寸 |
L:92mm(exclude flange)Diameter: 88mm 16000 |
| Weight 重量 | 850g |
|
Loading weight 承受重量 |
24N±3N |
|
Re-positioning accuracy 重复定位精度 |
<±0.1mm |
|
Loading of contact 接触器负载 |
24VDC Max. 100mA |
3、运行环境
1、接地:C种接地,接地电阻小于10欧姆。2、焊丝:盘装焊丝
3、使用环境条件(室内)
环境温度:-5℃~40℃。
相对湿度:≤80%。不结露。
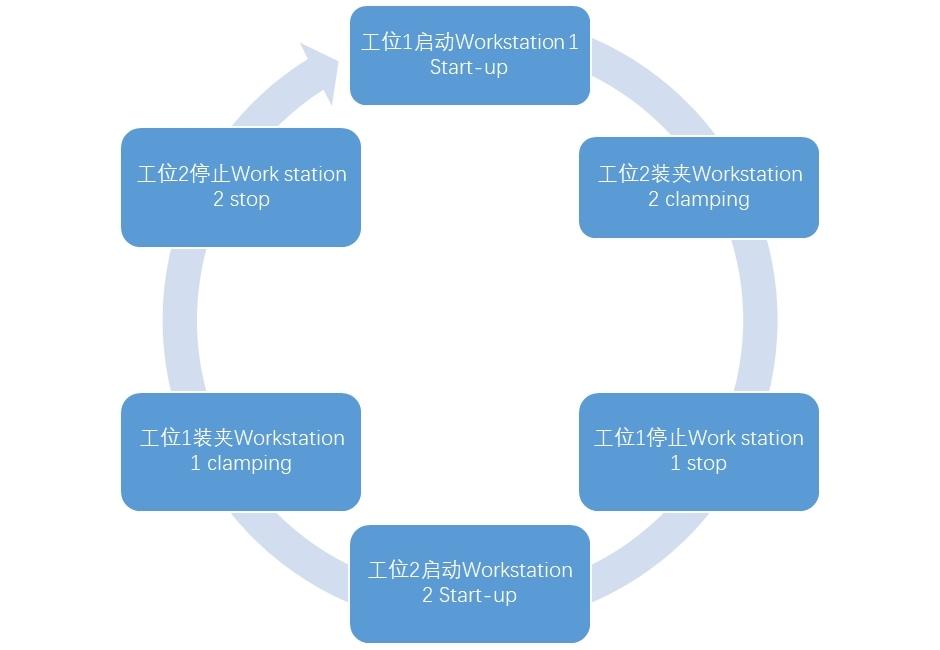
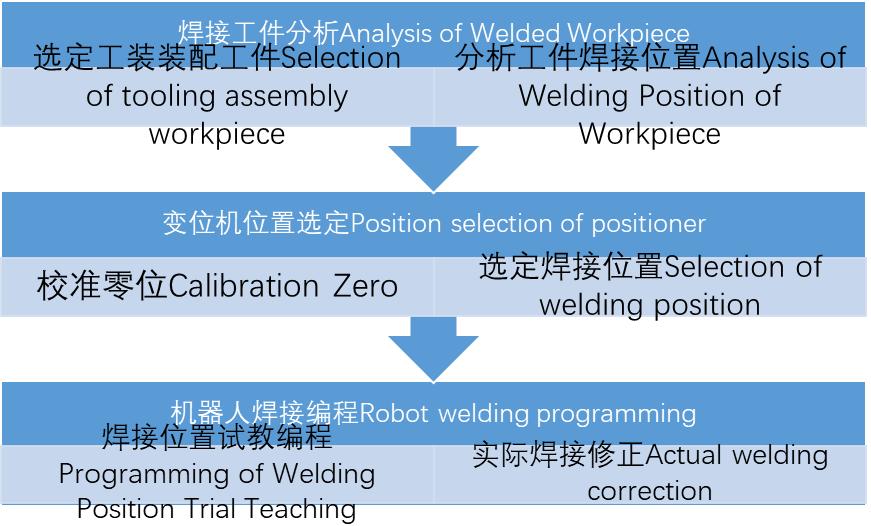
4、编程及工作流程
4.1编程流程
4.2工作流程